作者 |
来源 | 禾隐记
知圈 |
自动驾驶行业内不断存在两个道路之争,一个是感知计划之争,一派以为应该走纯视觉道路,一派以为应该走视觉与雷达的交融道路;另一个是无人驾驶的完成途径之争,一局部以为需求走从L1逐渐迈向L4的渐进式道路,另一局部以为应该走直达L4的逾越式道路。
本文将分别剖析下这两种道路之争中不同形式的区别,并提出一些考虑。
1. 感知计划:纯视觉 VS 多传感器交融
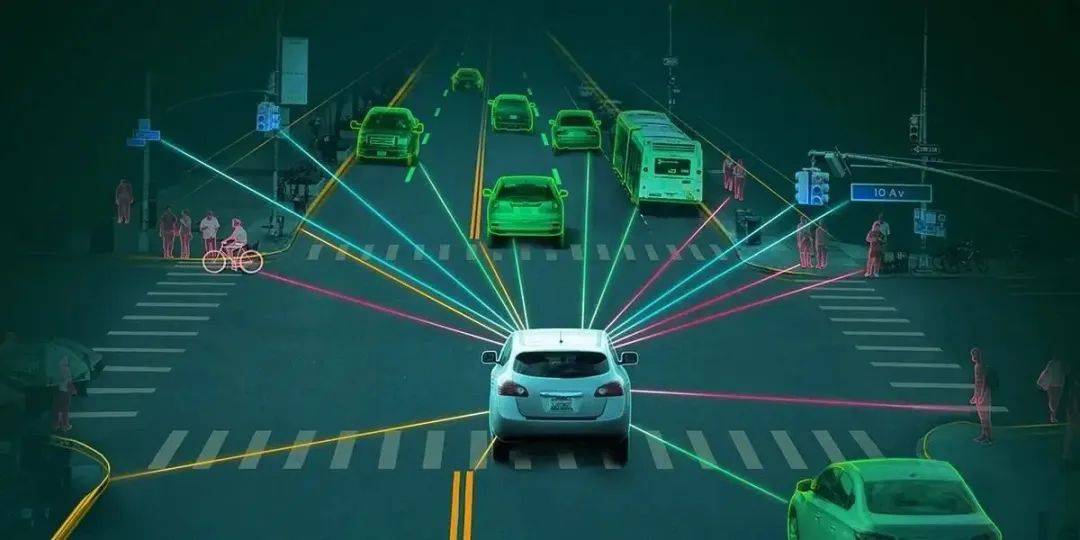
汽车完成自动驾驶首先需求可以“看见”四周环境,并对环境内的各种静态、动态物体有一定的认知,这个过程便是自动驾驶的“感知”,感知需求依赖装置在车体上的各种传感器完成,例如摄像头、激光雷达、毫米波雷达等等。
目前主流的感知计划有两种, 一种是以Waymo为代表的多传感器交融计划,即同时运用摄像头和雷达采集信息,分别应用摄像头和雷达特性,处置各自擅长的数据类型和任务,并将处置结果实行交融得到统一的感知结果; 一种是以Tesla为代表的纯视觉道路,即仅运用摄像头作为传感器实行信息采集,构建纯计算机视觉网络实行感知结果输出,相似于人眼的感知形式。
先来看下这几种不同传感器的才能特性:
总体来说,激光雷达看得远看得清,但看不见近处,是个远视眼,具有夜视才能,但对恶劣天气无能为力,同时只能看见三维构造,看不见二维平面构造;毫米波雷达是能看远也能看近,但越远越看不分明,是个近视眼,不只具有夜视才能,且具有恶劣天气条件下能看见的超才能,不过同样看不见二维平面构造;而摄像头仅凭本身才能很难精确判别间隔,但有算法加持,能够开展出这项才能,且摄像头能看见更多的信息,包括车道线等二维构造、物体分类、颜色等,是个超级眼,但在光线不佳、有雨雪雾等恶劣环境下,才能存在短板。
普通是经过“后交融”方式将不同传感器的感知结果实行交融,即每个传感器各自独立处置生成目的数据,当一切传感器完成目的数据生成后,再由主处置实行交融。
免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。
举报邮箱:3220065589@qq.com,如涉及版权问题,请联系。

















网友评论