作者 | 郭旭东、杨世春
来源 | 智能汽车开发者平台
1 引言
车辆智能化是汽车行业新的发展方向,其中自动驾驶是为了实现高度智能化的交通系统。对于自动驾驶车辆,为了增加其主动安全性,越来越多的车辆采用四轮转向系统,所以在转向时对规划路径进行精确跟踪与四轮的协同控制是自动驾驶领域亟待解决的新的问题。
对于有四轮转向(4WS)功能的自动驾驶特种车辆和高级乘用车,传统的控制方法如预瞄-跟踪模型、前馈反馈控制等只是基于系统运动学模型,很少建立精确的车辆动力学模型,也没有考虑车辆在高速工况下的动力学非线性约束条件。即使有些控制方法考虑了车辆模型,但大多是基于轮胎小角度假设建立的,当高速工况下轮胎侧偏角较大轮胎进入非线性区域时这种控制方法就会丧失稳定性,难以实现精确的路径跟踪效果。
基于以上自动驾驶4WS车辆的控制难题,本文将基于车辆动力学模型设计线性时变模型预测算法,利用其滚动优化和反馈校正的特性,来减小路径跟踪过程中的误差。另外,基于实际的轮胎侧偏特性,构造了权系数线性最优二次型算法对后轮转角进行控制,从而满足4WS自动驾驶车辆 的高速下路径跟踪过程中的平顺性和操纵稳定性需求,对模型预测算法和最优控制理论应用在自动驾驶运动规划领域 提供重要的使用价值和理论研究意义。
2 车辆侧向动力学建模
汽车四轮转向系统的稳定性主要取决于侧倾和横摆两个方向的运动。本文研究目标是车辆快速稳定地进行路径跟踪,属于车辆操纵稳定性问题,因此在建模时不考虑车辆的侧倾运动,建立车辆模型如图1所示。
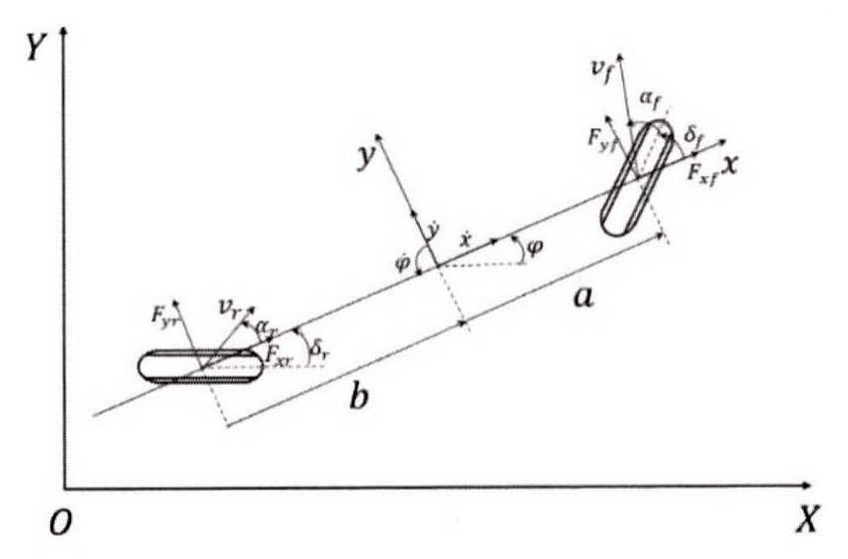
图1 车辆单轨模型
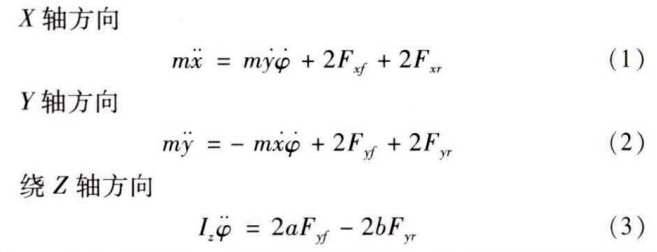
在图1中,坐标系。秒Z为车辆坐标系,坐标系OXY为大地坐标系。假设车辆模型为单轨模型,即只考虑车辆横向、纵向和横摆运动,经过受力分析,四轮转向模型如下:
免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。
举报邮箱:3220065589@qq.com,如涉及版权问题,请联系。

















网友评论